- XML
- Mapa del sitio
- +86 183 2084 9226
- sales@boxoptronics.com
- Spanish
- 日語
- Russian
- German
- English
- 中文






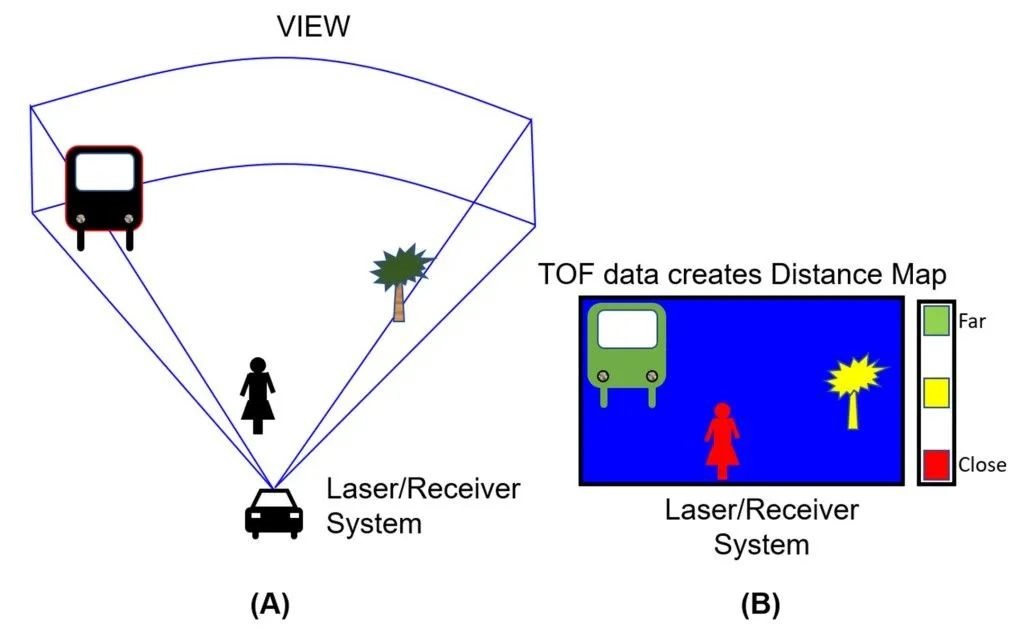

Figure 2: Each lidar transmit unit has a triangular "field of view". (Image credit: Bonnie Baker)
The drawing of the distance depends on the optical digital signal.
Signals in the digital domain
The circuit solution of lidar is to solve the problem of signal reception through automotive transimpedance amplifier. The input stage is used to accept negative input current pulses from the photodetector (Figure 3).
Abbildung 3: Der elektronische Teil eines Lidars besteht aus einem Laserdiodensender und zwei Photodiodenempfängern. (Bildnachweis: Bonnie Baker)
Laserdioden übertragen digitale Impulse durch ein Stück Glas. Dieses Signal wird auch auf der D2 Photodiode reflektiert. Die Verarbeitung dieses Signals liefert die Transitzeit und elektronische Verzögerung, die in das System integriert sind.
Die digitalen Lichtsignalpulse treffen auf das Objekt und werden zurück in das optische System reflektiert. Der zurückgehende Impuls wird auf die zweite Photodiode D1 gespiegelt. Der elektronische Teil des D1 Signalweges ist derselbe wie der D2 Signalweg. Die Flugzeit kann berechnet werden, nachdem die beiden Signale den Mikrocontroller (MCU) erreicht haben.
Marktmomentaufnahme
Automobil-Lidar-Systeme verwenden gepulstes Laserlicht, um den Abstand zwischen zwei Fahrzeugen zu messen. Automobilsysteme verwenden Lidar, um Fahrzeuggeschwindigkeit und Bremssysteme als Reaktion auf plötzliche Veränderungen der Verkehrsverhältnisse zu steuern. Lidar spielt eine wichtige Rolle in halb- oder vollautomatischen Autoassistenzfunktionen wie Kollisionswarnsystemen und Vermeidungssystemen, Spurhalteassistenten, Spurhaltewarnungen, Totwinkel-Monitoren und adaptiver Tempomat. Automotive Lidar ersetzt Radarsysteme in früheren Fahrzeugautomationssystemen. Lidar Systeme können von wenigen Metern bis über 1.000 Meter reichen.
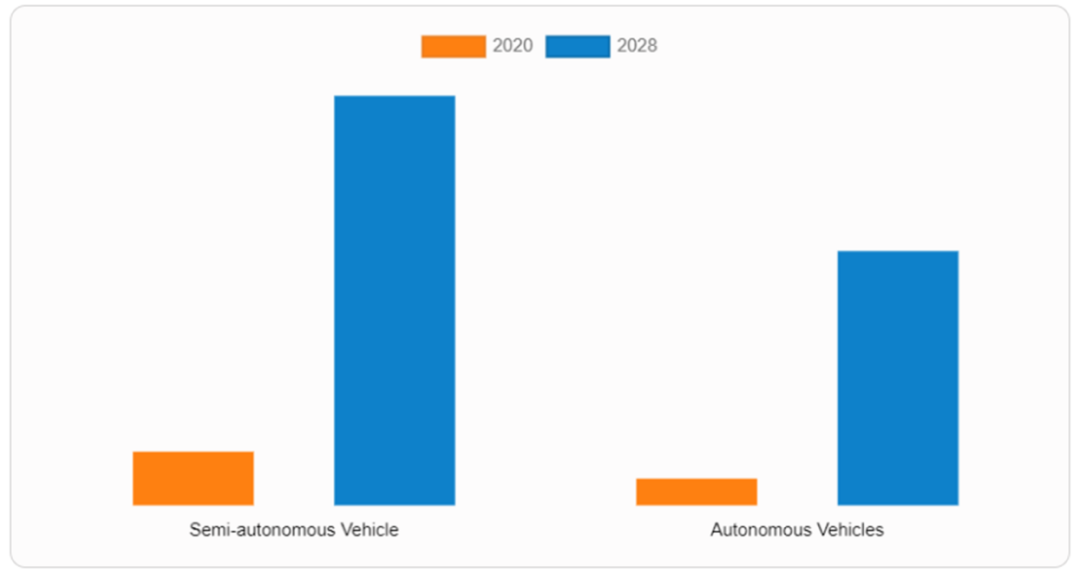
Abbildung 4: Der Automobil-Lidar-Markt ist in semi-autonome und vollautomatische Fahrzeuganwendungen unterteilt. (Bildquelle: Allied Market Research)
Selbstfahrende Autos sind bereits weit verbreitet, und Lidar-Bildgebungssysteme werden die Situation weiter verbessern. Radar, Kameras und Lidar-Ausrüstung sind nach wie vor die Technologien der Wahl für semi- und vollautonomes Fahren, und der Preis für Lidar sinkt, und der Markt beschleunigt diesen Wandel.






 Box optronics
Box optronics Box optronics
Box optronics 'sales@boxoptronics.com'
'sales@boxoptronics.com'